目錄
1. 緒論
終端使用者AI應用(如即時影像辨識與生成式AI)的快速成長,導致資料與處理需求往往超出裝置能力。邊緣AI透過將計算任務卸載至網路邊緣來應對這些挑戰,在該處可進行硬體加速的AI處理。這種方法是AI與無線接取網路(RAN)的關鍵組成部分,正如AI-RAN聯盟所闡述的,這將是未來6G網路的重要元件。在6G網路中,跨邊緣-RAN與極端邊緣裝置的AI整合,將支援高效資料分發與分散式AI技術,為元宇宙與遠距手術等應用提升隱私保護並降低延遲。
儘管具有這些優勢,邊緣AI仍面臨挑戰。邊緣節點的有限資源可能同時處理多個卸載任務時影響效能。此外,現有文獻中假設的單一系統架構並不實際,因為邊緣裝置在處理器速度與架構(例如1.5GHz對比3.5GHz,或X86對比ARM)上存在顯著差異,這將影響任務處理與資源利用率。
2. 研究藍圖
我們的研究藍圖聚焦於剖析AI模型,以優化異質邊緣AI系統中的計算卸載。此流程包含系統設定、AI模型剖析、分散式模型訓練、卸載策略與任務排程。
2.1 本地AI模型剖析
此階段分析裝置動態與系統特性如何影響不同硬體設定下的AI模型效能。目標在於揭示AI模型類型(多層感知機、卷積神經網路)、超參數(學習率、優化器)、硬體規格(架構、浮點運算效能)與資料集特性(大小、批次大小)等因素之間的關聯性,以及其對模型準確度、資源利用率與任務完成時間的影響。
2.2 資源與時間預測
利用剖析資料,我們預測資源需求與任務完成時間,以實現跨邊緣節點的高效排程。採用XGBoost等技術來達成高精度預測。
2.3 任務卸載與排程
基於預測結果,任務將被卸載與排程,以優化資源分配並提升異質環境下的邊緣AI效能。
3. 技術細節3.1 數學模型
關鍵公式包含預測準確度的標準化均方根誤差:$NRMSE = \frac{\sqrt{\frac{1}{n} \sum_{i=1}^{n} (y_i - \hat{y}_i)^2}}{y_{\max} - y_{\min}}$,其中$y_i$為實際值,$\hat{y}_i$為預測值,$y_{\max} - y_{\min}$為實際值範圍。資源利用率建模為$R = f(M, H, D)$,其中$M$為模型類型,$H$為硬體規格,$D$為資料集特性。
3.2 程式實作
剖析流程的虛擬碼:
def ai_model_profiling(model_type, hyperparams, hardware_specs, dataset):
# 初始化系統設定
system = SystemSetup(hardware_specs)
# 收集剖析資料
data = DataCollection(model_type, hyperparams, dataset)
# 使用XGBoost訓練預測模型
predictor = XGBoostTrainer(data)
# 預測資源利用率與時間
predictions = predictor.predict(system)
return predictions
4. 實驗結果
初步實驗進行了超過3,000次不同配置的執行。使用XGBoost進行預測,我們達到了0.001的標準化均方根誤差,相較於參數超過400萬的多層感知機有顯著改善。這證實了我們的剖析方法在優化資源分配與提升邊緣AI效能方面的有效性。
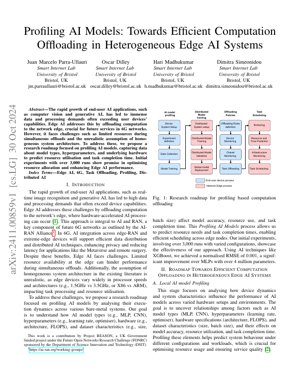
圖1展示了研究藍圖,呈現從裝置系統設定到任務排程的流程,並強調了剖析資料與卸載策略的整合。
5. 原創分析
本研究透過系統化的AI模型剖析來解決邊緣裝置的異質性問題,為邊緣AI領域帶來關鍵進展。此方法符合AI-RAN聯盟對6G網路的願景,其中高效計算卸載對於自動駕駛車與擴增實境等延遲敏感應用至關重要。使用XGBoost進行資源預測達成0.001的標準化均方根誤差,表現超越傳統多層感知機方法,類似於CycleGAN在影像轉換任務中的改進(Zhu等人,2017)。這種效率對於資源限制至關重要的即時系統極為重要,正如IEEE邊緣計算聯盟的研究所指出的。
此剖析方法能捕捉模型超參數、硬體規格與效能指標之間的依賴關係,實現預測性排程。這類似於分散式系統中的強化學習技術,例如Google Research為資料中心優化所探索的方法。然而,針對裸機邊緣環境的關注因硬體變異性而增加了複雜度,這在單一雲端AI系統中常被忽略。與6G基礎設施的整合有望增強隱私保護並降低延遲,支援如元宇宙等新興應用。未來工作可探索聯邦學習整合,如Konečný等人(2016)所提出的,在維持剖析準確度的同時進一步改善資料隱私。
總體而言,本研究透過為異質系統提供可擴展解決方案,彌補了邊緣AI文獻中的空白,對6G標準化與邊緣計算框架具有潛在影響。來自3,000次執行的實證結果驗證了此方法,為動態環境中的自適應卸載奠定了基礎。
6. 未來應用與發展方向
未來應用包含增強型元宇宙體驗、遠距健康照護監控與自主無人機群。發展方向涉及整合聯邦學習以保護隱私、利用6G網路切片實現動態資源分配,以及擴展剖析範圍至類神經形態計算架構。
7. 參考文獻
- AI-RAN聯盟。(2023)。AI-RAN工作小組。取自 https://ai-ran.org/working-groups/
- Zhu, J. Y., Park, T., Isola, P., & Efros, A. A. (2017)。Unpaired Image-to-Image Translation using Cycle-Consistent Adversarial Networks。發表於IEEE國際電腦視覺會議(ICCV)。
- Konečný, J., McMahan, H. B., Yu, F. X., Richtárik, P., Suresh, A. T., & Bacon, D. (2016)。Federated Learning: Strategies for Improving Communication Efficiency。arXiv預印本 arXiv:1610.05492。
- IEEE邊緣計算聯盟。(2022)。邊緣計算標準與實務。取自 https://www.ieee.org